
introducing salto-1p, the miniature robot whose jumping function gives it the energy of a hyper-aggressive pogo-stick. created by UC berkeley’s biomimetic millisystems lab, salto, short for ‘saltatorial locomotion on terrain obstacles,’ is designed to mimic saltatorial – jumping – animals like kangaroos and rabbits.
all images © biomimetic millisystems lab/UC berkeley
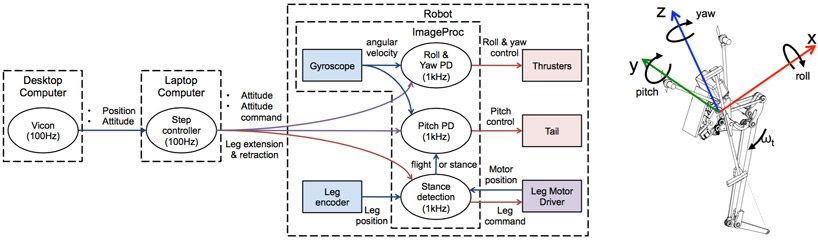
salto-1P uses a small motor and a system of linkages and gears to jump, making little contact with the ground. whilst in the air, it uses a rotating inertial tail and two little thrusters to stabilize and reorient itself in between jumps.
videos by IEEE spectrum
originally, salto was able to control its pitch through the use of a rotating inertial tail. by spinning the tail one way, the robot could launch into a different direction. weighing in at only at only 98 grams, it harnesses enough power to give it the highest vertical jumping agility of any battery powered robot at 1.83 m/s. unfortunately, even with its most recent updates, the jumping robot’s extreme saltatorial skills are the cause of its demise (see the video).


happening now! in an exclusive interview with designbooom, CMP design studio reveals the backstory of woven chair griante — a collection that celebrates twenty years of Pedrali’s establishment of its wooden division.
robots (558)
 Apr 26, 2025
Apr 26, 2025 Apr 14, 2025
Apr 14, 2025 Apr 10, 2025
Apr 10, 2025 Apr 07, 2025
Apr 07, 2025 Mar 31, 2025
Mar 31, 2025 Mar 14, 2025
Mar 14, 2025 Mar 13, 2025
Mar 13, 2025 Mar 10, 2025
Mar 10, 2025