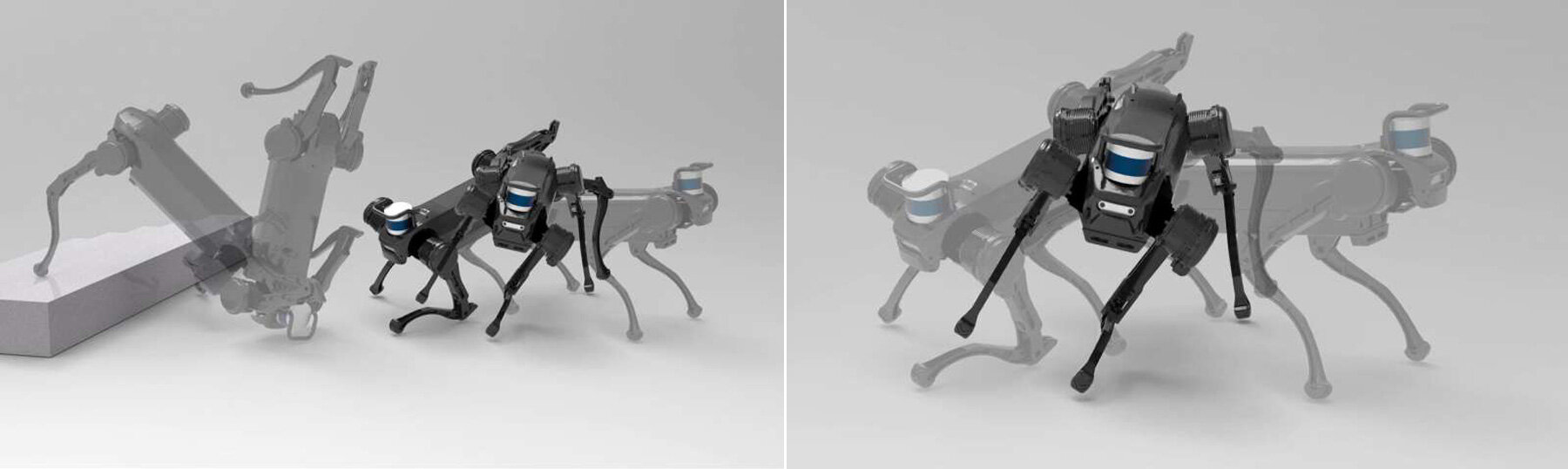
a team of researchers from china’s zhenjiang university and the university of edinburgh has created a new method to train robots inspired in the way humans learn — through trial and error. this new approach distances itself, for example, from boston dynamic’s robots which are fed with precise lines of code that dictate every movement. on a recent paper published in the journal science robotics, the team presents yueying, a robot dog that learns how to get up after being knocked down.

‘the AI approach is very different in the sense that it captures experience, which the robot has tried hundreds of thousands of times, or even millions of times,’ university of edinburgh roboticist zhibin li said to wired. ‘so in the simulated environment, I can create all possible scenarios. I can create different environments or different configurations. for example, the robot can start in a different pose, such as lying down on the ground, standing, falling over, and so on.’
to train the robot, the team created eight algorithms for each skill — walking, balancing, steering, etc. each algorithm was rewarded with virtual points once they successfully completed a task and deployed from them if they failed, leading them to master the skill. an additional network was created to control the eight algorithms, acting as a kind of brain or coach. ‘the coach or the captain will tell who is doing what, or who should do work together, at which time, so all experts can collaborate together as a whole team, and this drastically improves the capability of skills,’ li comments.
if you can’t get enough of this, watch boston dynamics’ robots celebrate the end of 2020 with a perfectly choreographed dance party.
the eight algorithms controlled by the coach
project info:
paper name: multi-expert learning of adaptive legged locomotion
researchers: chuanyu yang, kai yuan, qiuguo zhu, wanming yu and zhibin li
journal: science robotics
via: wired

artificial intelligence (419)
 Jan 02, 2025
Jan 02, 2025 Dec 30, 2024
Dec 30, 2024 Dec 27, 2024
Dec 27, 2024 Dec 23, 2024
Dec 23, 2024 Dec 19, 2024
Dec 19, 2024robots (547)
 Dec 20, 2024
Dec 20, 2024 Nov 08, 2024
Nov 08, 2024 Oct 28, 2024
Oct 28, 2024 Oct 15, 2024
Oct 15, 2024 Dec 04, 2024
Dec 04, 2024 Nov 05, 2024
Nov 05, 2024 Oct 19, 2024
Oct 19, 2024