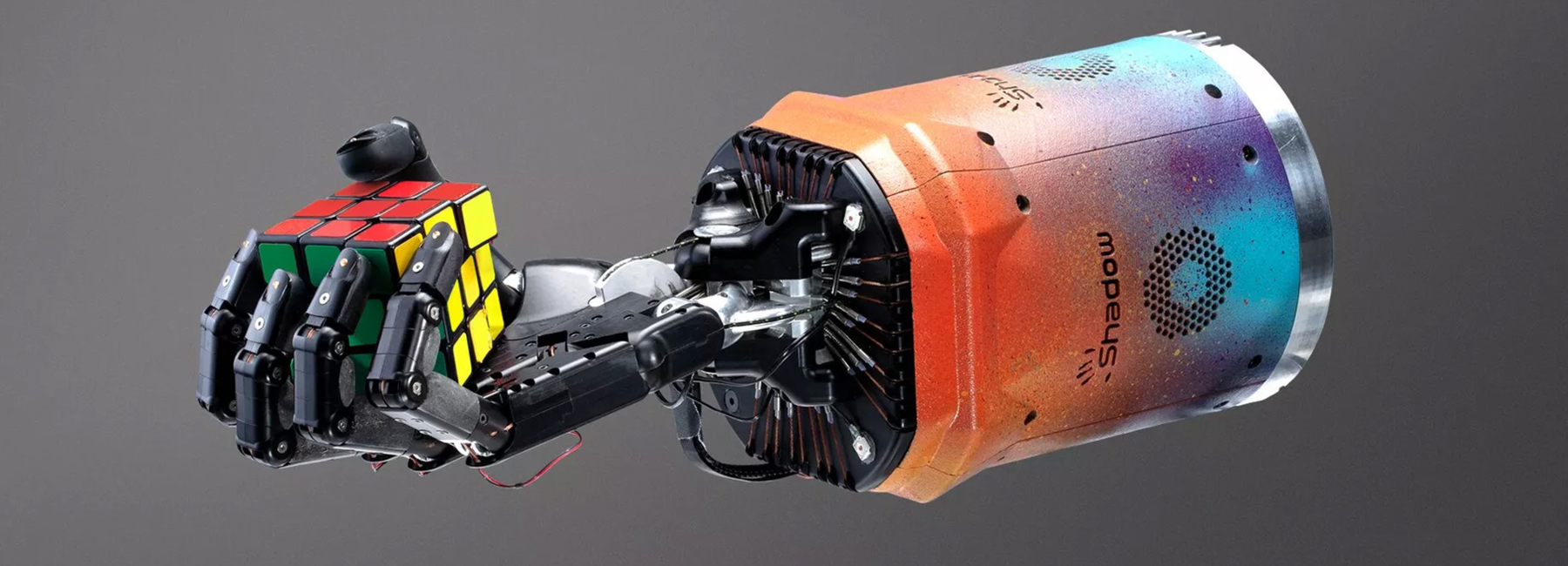
researchers at openAI have developed a robotic arm that uses artificial intelligence to solve a rubik’s cube one-handed. the extremely dextrous robot features a 24-joint human-hand-like design and took only four minutes to complete the task.
images courtesy of openAI
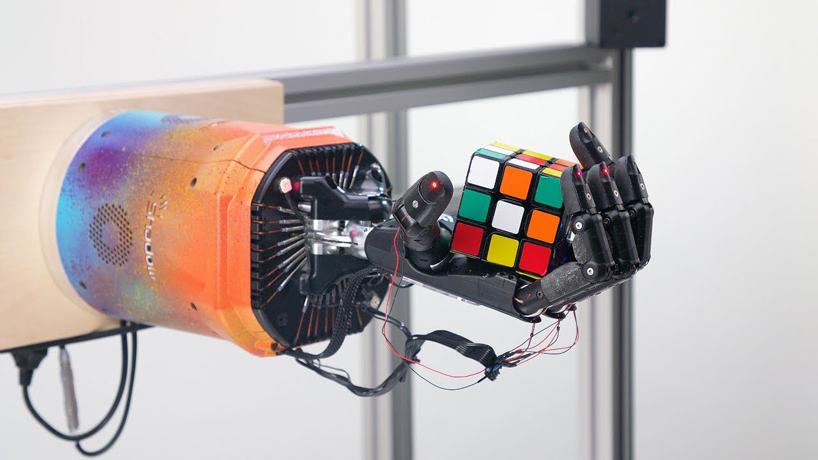
openAI used a computer simulation to teach the robot, dubbed ‘dactyl’, hand how to solve the cube, running through routines that would take a human 13,000 years to complete. visual sensors and a cube-solving algorithm gave the AI instructions on what moves to make.
video by openAI
‘the biggest challenge we faced was to create environments in simulation diverse enough to capture the physics of the real world,’ says ashley pilipiszyn, technical director at openAI. ‘factors like friction, elasticity and dynamics are incredibly difficult to measure and model for objects as complex as rubik’s cubes or robotic hands and we found that domain randomization alone is not enough.’

‘to overcome this, we developed a new method called automatic domain randomization (adr), which endlessly generates progressively more difficult environments in simulation,’ she adds. ‘this frees us from having an accurate model of the real world, and enables the transfer of neural networks learned in simulation to be applied to the real world.’
openAI hopes that its developed AI could be used to control the hands of robots in a variety of general-purpose tasks.
project info
company: openAI
paper: solving rubik’s cube with a robot hand
authors: openai, ilge akkaya, marcin andrychowicz, maciek chociej, mateusz litwin, bob mcgrew, arthur petron, alex paino, matthias plappert, glenn powell, raphael ribas, jonas schneider, nikolas tezak, jerry tworek, peter welinder, lilian weng, qiming yuan, wojciech zaremba, lei zhang.
photographer: eric haines


happening now! in an exclusive interview with designbooom, CMP design studio reveals the backstory of woven chair griante — a collection that celebrates twenty years of Pedrali’s establishment of its wooden division.
artificial intelligence (441)
 Apr 29, 2025
Apr 29, 2025 Apr 26, 2025
Apr 26, 2025 Apr 17, 2025
Apr 17, 2025 Apr 14, 2025
Apr 14, 2025 Apr 02, 2025
Apr 02, 2025robots (558)
 Apr 26, 2025 Apr 14, 2025
Apr 26, 2025 Apr 14, 2025 Apr 10, 2025
Apr 10, 2025 Apr 07, 2025
Apr 07, 2025 Mar 31, 2025
Mar 31, 2025 Mar 14, 2025
Mar 14, 2025 Mar 13, 2025
Mar 13, 2025 Mar 10, 2025
Mar 10, 2025