MIT researchers at CSAIL have developed a lane-changing algorithm for self-driving cars. the algorithm allows for aggressive lane changes much like the kind only real drivers would be capable of.
it works by computing ‘buffer zones’ around autonomous vehicles and reassessing them on the fly. MIT uses a mathematically efficient approach which calculates new buffer zones if the default buffer zones lead to performance that’s far worse than a human’s driver.
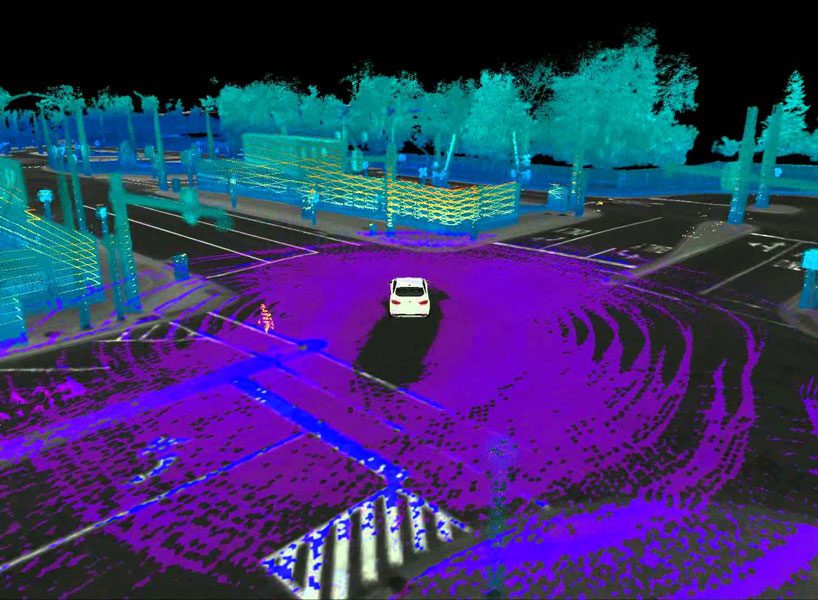
MIT’s new autonomous navigation system, maplite
images courtesy of MIT CSAIL
‘the optimization solution will ensure navigation with lane changes that can model an entire range of driving styles, from conservative to aggressive, with safety guarantees,’ says rus, who is the director of CSAIL. toyota is backing the project alongside the office of naval research.
MIT is leading developments in technology regarding driverless cars. earlier this month MIT unveiled a new autonomous navigation system called maplite allowing driverless cars take on rural roads without any prior mapping.

happening now! thomas haarmann expands the curatio space at maison&objet 2026, presenting a unique showcase of collectible design.
driverless cars (171)
 Jan 09, 2026
Jan 09, 2026 Oct 30, 2025
Oct 30, 2025 Oct 29, 2025
Oct 29, 2025 Sep 10, 2025
Sep 10, 2025 Apr 28, 2025
Apr 28, 2025MIT news (84)
 Dec 29, 2025
Dec 29, 2025 Dec 12, 2025
Dec 12, 2025 Nov 19, 2025
Nov 19, 2025 Sep 26, 2025
Sep 26, 2025 May 16, 2025
May 16, 2025toyota (68)
 Dec 15, 2025 Oct 30, 2025
Dec 15, 2025 Oct 30, 2025 Oct 29, 2025
Oct 29, 2025 Mar 15, 2025
Mar 15, 2025 Jan 07, 2025
Jan 07, 2025 Dec 08, 2025
Dec 08, 2025 Dec 06, 2025
Dec 06, 2025 Nov 19, 2025
Nov 19, 2025 Nov 04, 2025
Nov 04, 2025