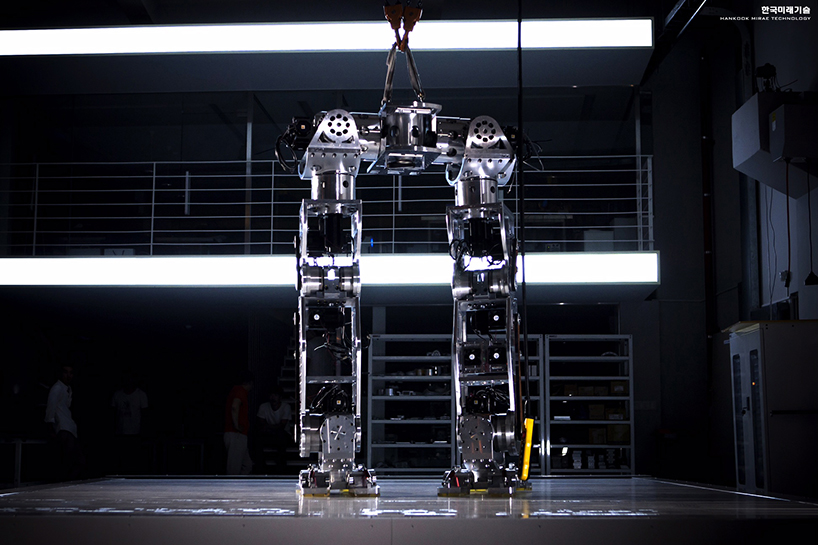
after many years of working for science fiction movies like transformers, robocop and terminator, designer vitaly bulgarov has brought to life a giant 4-meter-tall, 1.5 ton robot called ‘METHOD-2’. developed by south korean firm hankook mirae technology robotics, the metal creature took its first steps, positively surprising the 30 engineers and members of the media who were able to witness it. the company claims that it is the world’s first bipedal robot, and that it has been built to help humans reach dangerous, extreme and hazardous areas where they can’t go unprotected.

all images and videos by hankook mirae technology
the giant robot can host a person inside its torso, allowing the user to generate movements mimicked by METHOD-2. initiated in 2014, the project has received $200 million USD in investment and aims to be completed by 2017, selling each robot at a price of around $8.3 million. the company also states that the robot is really young and it just took its first baby steps: ‘just like humans, it will be able to move more freely in the next couple of years,’ says hankook mirae technology chairman yang jin-ho.
when asked what the robot is for, designer vitaly bulgarov commented, ‘from a mechanical / software / hardware / electric engineering standpoint, it was quite an ambitious project that required developing and enhancing a lot of technologies along the way. that growth opens up many real world applications where everything we have been learning so far on this robot can be applied to solve real world problems.’

the robot measures four meters in height

METHOD-2 can be controlled by humans who sit inside its torso

the movements the human makes are mimicked by the robot

METHOD-2 looks like it has been taken from a sci-fi movie
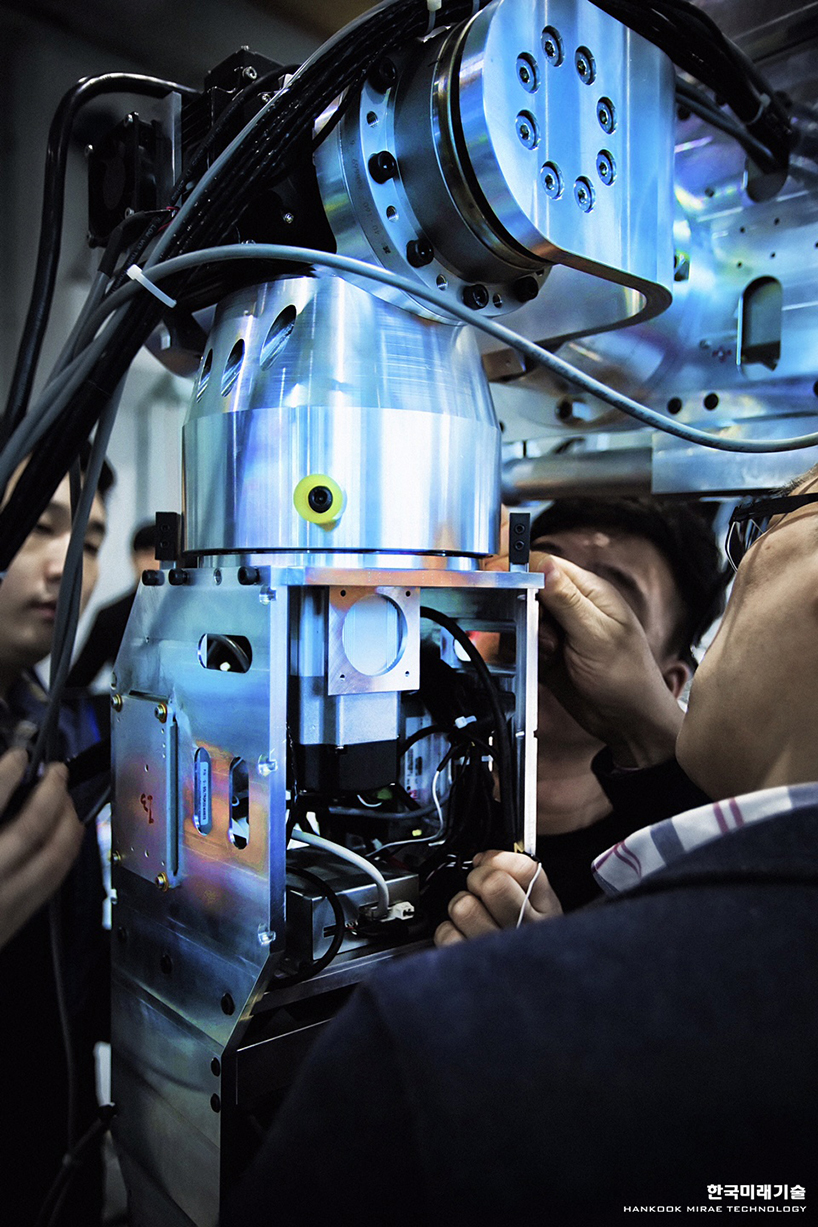
a team of over 30 engineers has been working for the past couple of years on the technology
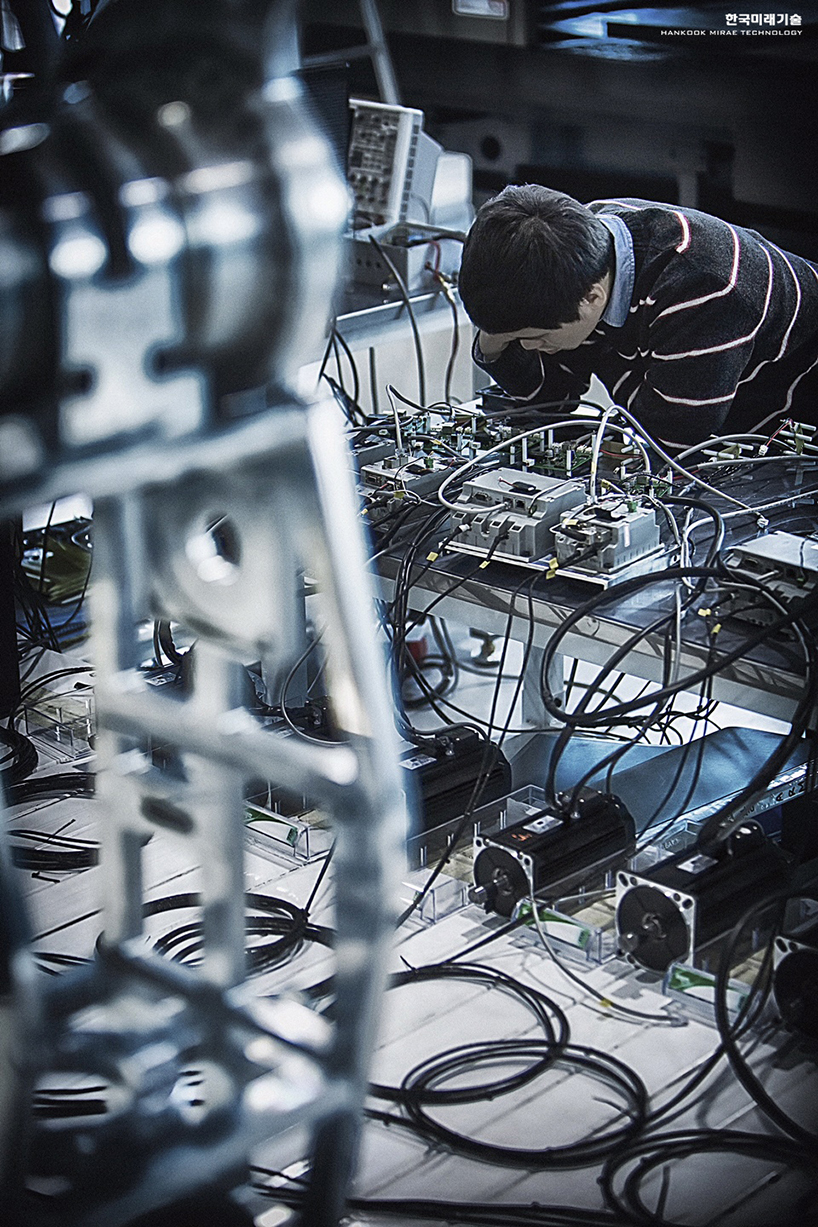
the developments will help enhance others technologies
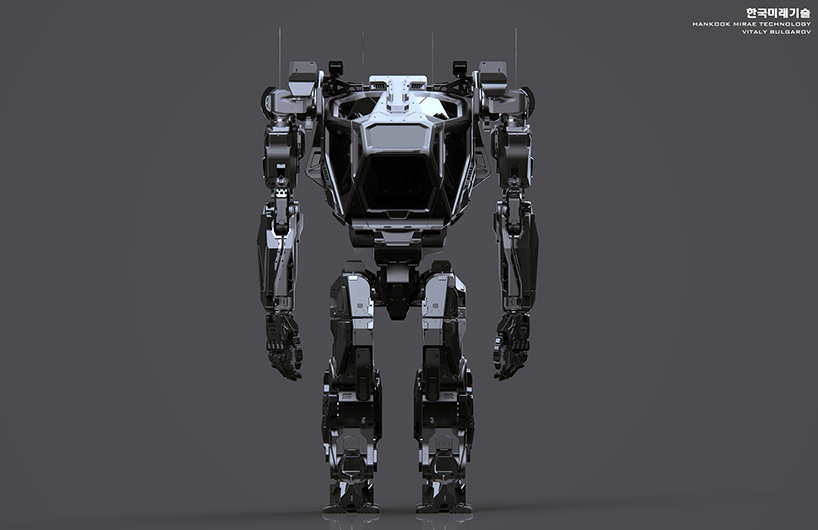
the robot features an utilitarian design aesthetic
the revised design considers requirements for joints DOF, ROM and overall kinematics

foot detail
via foxtrot alpha