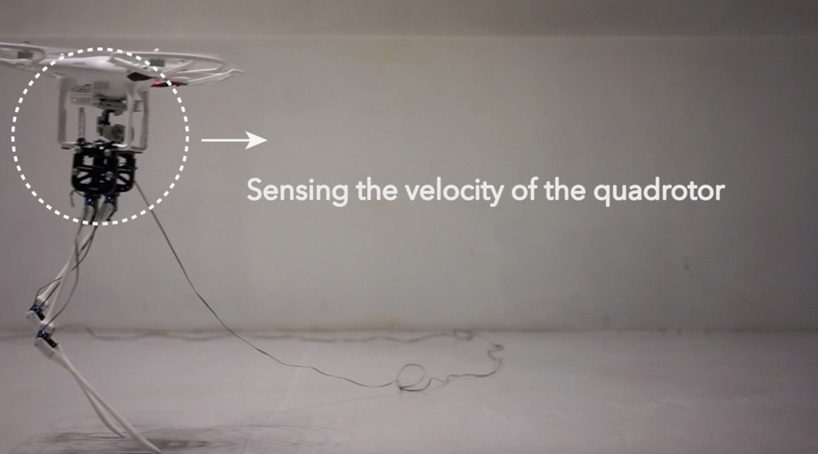
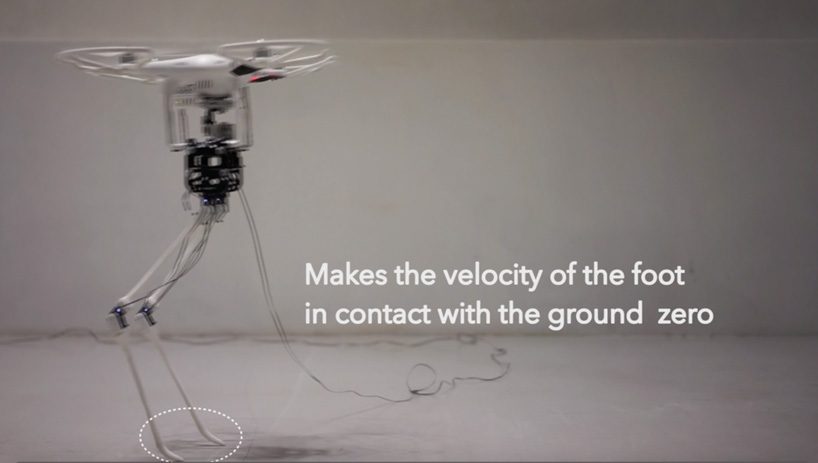
researchers from the university of tokyo have developed a biped robot with slim, tall legs that can move lighter and quicker than conventional robots. using a quadrotor for balance and movement, the robot is designed more for entertainment than any practical purpose, while its system takes the quadrotor’s velocity to produce a bipedal walking motion.

video screenshots
developed by azumi maekawa, ryuma niiyama and shunji yamanaka, the prototype robot was presented at SIGGRAPH emerging technologies in vancouver, canada. ‘we propose a biped robot for entertainment using a quadrotor,’ mention the researchers, ‘this robot can move agiler than conventional robots and generate a gait in real time using the control policy which makes the velocity of the foot in contact with the ground to zero, as the velocity of the quadrotor is input.’ as a next step, the three plan to increase the degree of freedom of the biped robot’s body and legs, with the possibility of various motions including walking and dancing, imitating the motion of the character in the animation.



happening now! step inside highsnobiety’s not in milan: classics reinvented – where design’s past meets its future – as designboom previews the show ahead of milan design week 2025.
robots (554)
 Mar 31, 2025
Mar 31, 2025 Mar 22, 2025
Mar 22, 2025 Feb 26, 2025
Feb 26, 2025 Jan 14, 2025
Jan 14, 2025 Jan 09, 2025
Jan 09, 2025 Mar 14, 2025
Mar 14, 2025 Mar 13, 2025
Mar 13, 2025 Mar 10, 2025
Mar 10, 2025