
dexta robotics dexmo exoskeleton hand connects digital and real world
images courtesy of dexta robotics
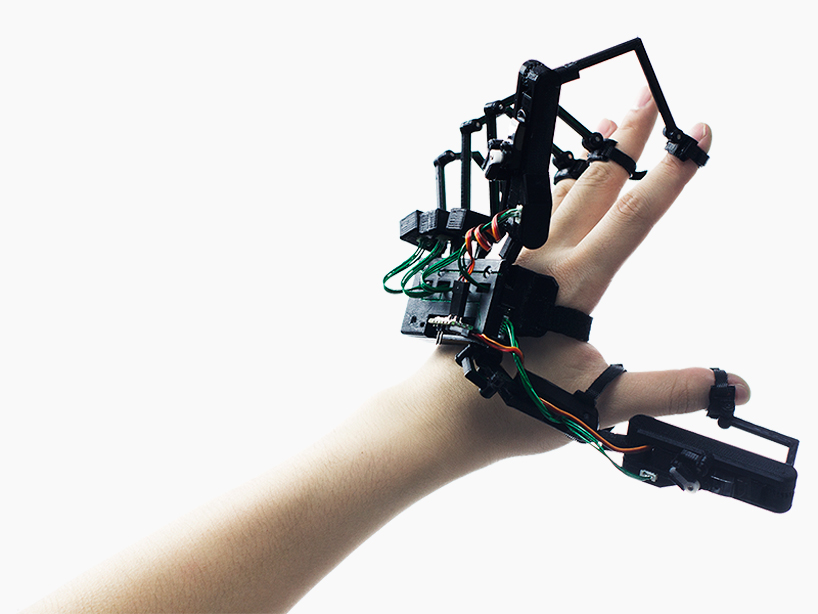
the dexta robotics’ ‘dexmo’ wearable exoskeleton hand captures user’s motion as well as providing forceful feedback to connect the digital and real world. the original development, the ‘classic’, catches 11 degrees of freedom for the hand’s movement and can offer developers an accurate model skeleton with the help of the inverse kinematics algorithms too.
dexta robotics dexmo kickstarter video
videos courtesy of dexta robotics
further developments created the ‘dexmo F2’ which has the same functionality as the ‘classic’ but provides digital force feedback that acts similarly to a gear braking system. this means that when the controlled-avatar hits an object, a signal is sent back via a built-in SDK to the ‘dexmo’ exoskeleton’s small actuators that brakes and locks the gadget’s joints. by using inexpensive rotational sensors and injection molded plastic parts, the device’s cost is greatly reduced and is an affordable hardware for robotic developers.
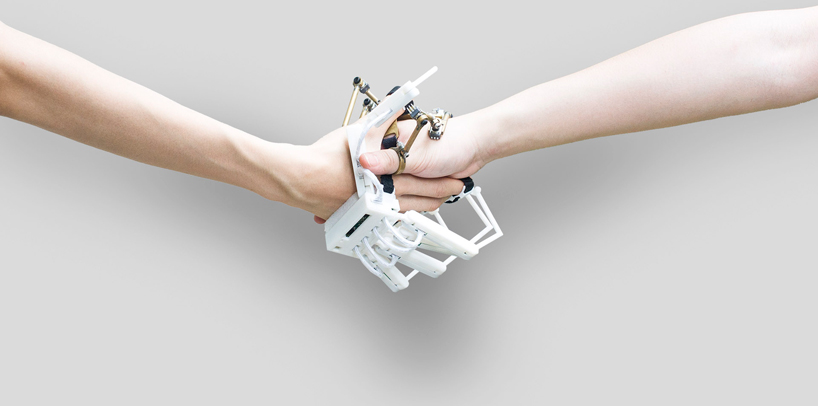
the ‘dexmo f’ wearbale exoskeleton
dexta robotics ‘dexmo’ exoskeleton is aiming to fund the development via its kickstart campaign.

live testing and testimonials at the oculus connect 2014

the range of developments that have led to the dexmo F2


happening this week! holcim, global leader in innovative and sustainable building solutions, enables greener cities, smarter infrastructure and improving living standards around the world.
wearable technology (280)
 Oct 29, 2024
Oct 29, 2024 Sep 26, 2024
Sep 26, 2024 Sep 10, 2024
Sep 10, 2024 Aug 29, 2024
Aug 29, 2024 Aug 22, 2024
Aug 22, 2024PRODUCT LIBRARY
 Nov 05, 2024
Nov 05, 2024 Oct 19, 2024
Oct 19, 2024 Oct 11, 2024
Oct 11, 2024