elephant trunk influenced bionic handling assistant by festo learns like a baby
all images © testo
the bionic handling assistant by festo – a robotic arm influenced by the elephant’s trunk – is a proof of concept from 2010, designed in an attempt to revolutionize handling technology for human-machine cooperation. with the bionic handling assistant, direct contact between machines and their human operators – whether accidental or intentional – doesn’t compromise safety; in the event of a collision with a human, the artificial pneumatic arm yields immediately, without modifying its desired overall dynamic behavior. unlike heavy industrial robots, the device then resumes its operation, which is characterized by a mass-payload ratio, smooth operating motion with more degrees of freedom and efficient use of resources.
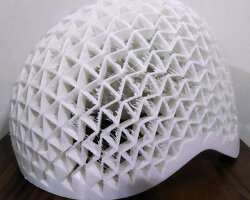
formed out of complex 3D printed parts, the biomechatronic handling system consists of three basic elements for spatial movement, together with a hand axis with ball joint and a gripper with adaptive fingers. however, beyond a handful of motions, such as shaking hands or grasping a bottle, the machine wasn’t built with its own precision control software.

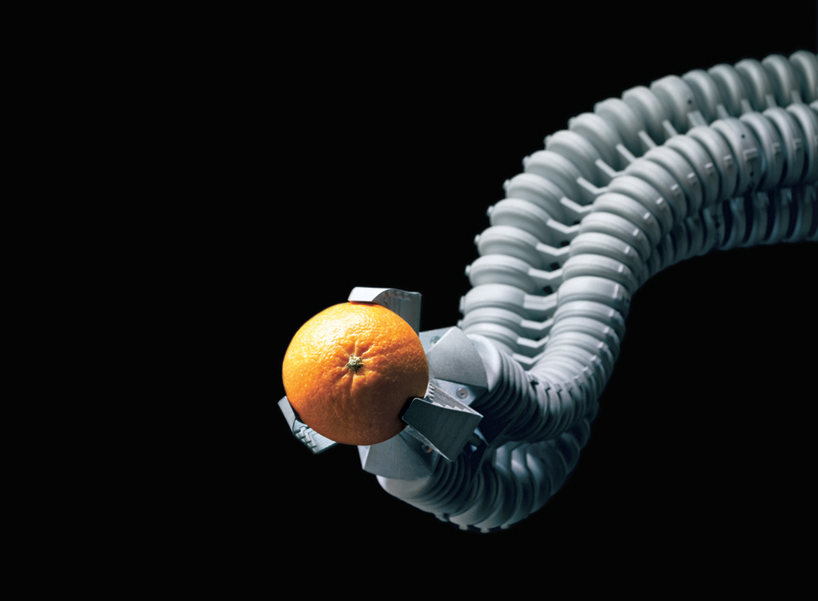
in 2014, the engineers from festo has used a process called ‘goal babbling’, and according to newscientist, ‘mimics the way a baby learns to grab things by continually reaching – a process of trial and error that lets them work out which muscles they need to move.’ the trunk can now be manually forced into a series of positions and learn to adopt them on command; it can now be trained to repeat actions and pluck anything from ‘light bulbs to hazelnuts.’

the robot remembers what happens to the trunk’s position when changes are made to the pressure in the thin pneumatic tubes feeding the artificial muscles, creating a map that relates the trunk’s precise position to the pressures in each tube.

the flexible handling assistant transmits large forces and serves as a precise gripping tool
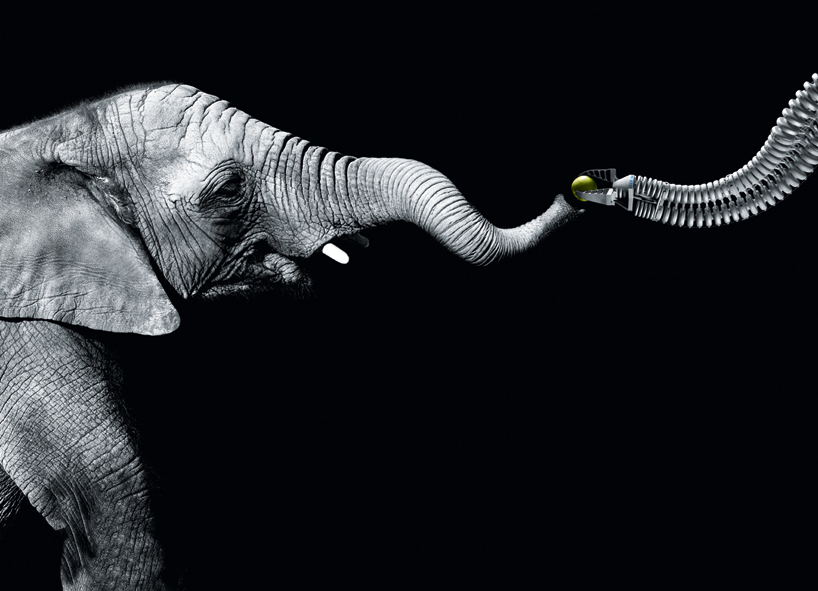
human-machine cooperation has been analyzed through the elephant trunk’s structure and functions
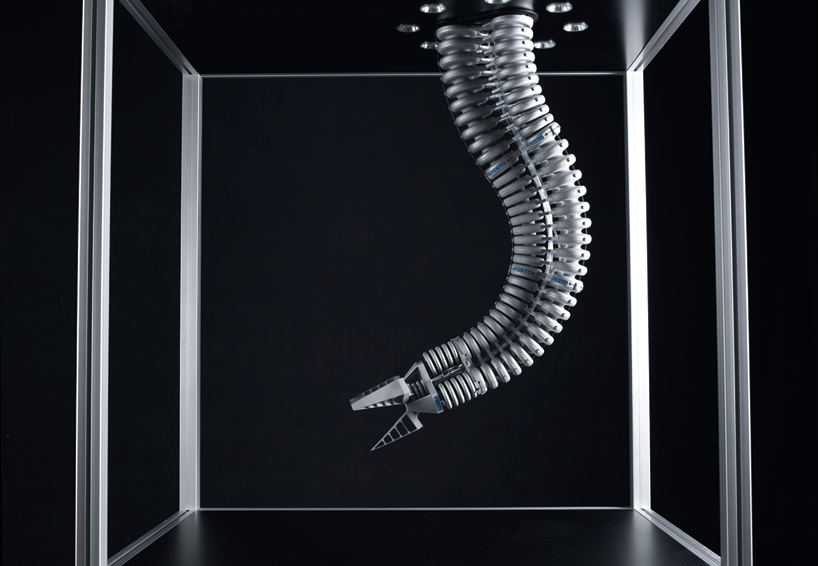
the robot consists of three elements for spatial movement; a hand axis with ball joint and a grip with adaptive fingers

detail
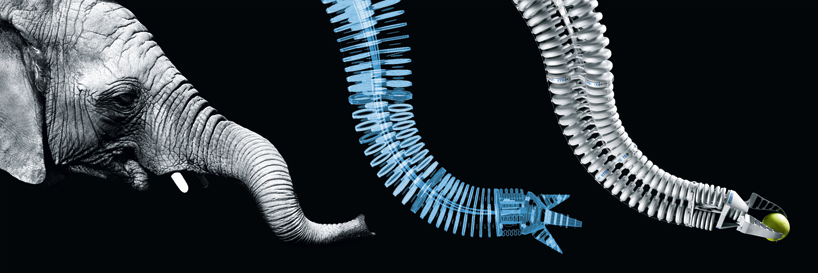
the robotic arm is influenced by the elephant’s trunk
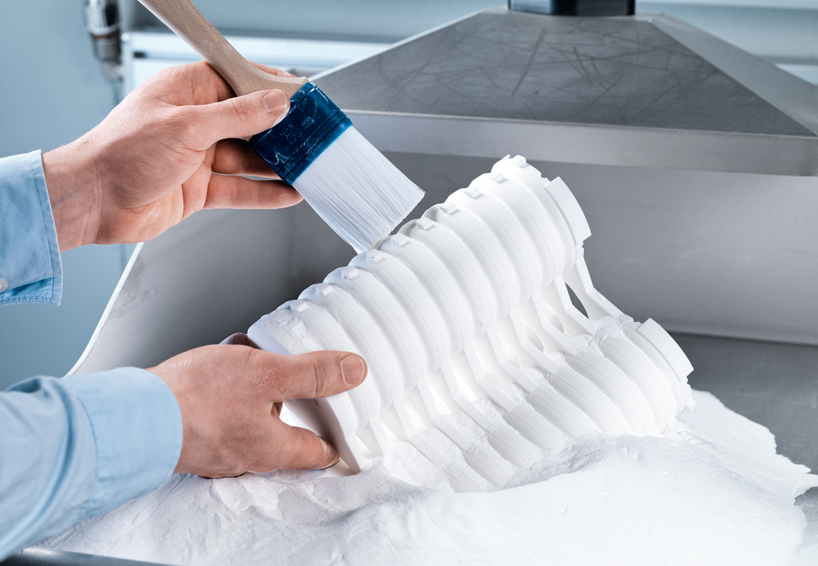
3D printed polyamide movable system components are applied in thin layers onto a base platform during production